
These are crazy times we live in and I thought for a while about releasing this project. However, you don’t have that many opportunities to actively do something against the spread of viruses like the Corona virus. Stay at home and wash your hands. Well, I have an idea for hand washing and so I’ll show you how to build a touchless soap dispenser with Arduino.
Components
- 1x Arduino UNO*
- 1x IR distance sensor GP2Y0A41SK0F*
- 1x servo motor*
- cables
Circuit
The circuit consists of two partial circuits. The infrared distance sensor is connected to 5V+,GND and the analog input 0. The servo motor is also connected to 5V+ and GND. It is controlled via the digital pin 7.
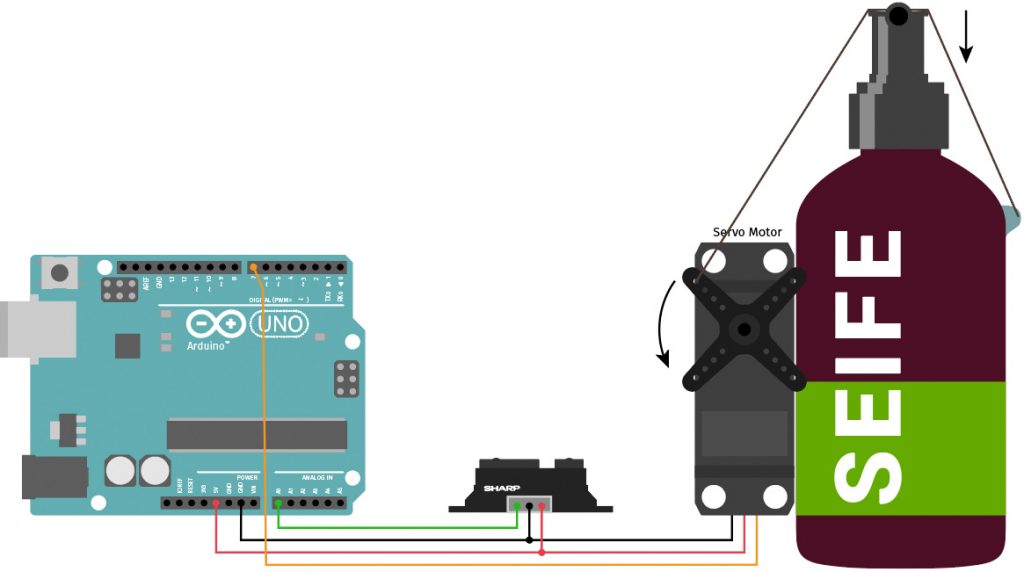
Functionality
The sensor can be installed above the soap dispenser looking down or next to the soap dispenser looking up. It reacts within a range of 10 – 30 cm and activates the servo motor via the Arduino. The servo motor pulls on a string that runs over the pump of the soap dispenser and is fixed on the other side. This pushes the pump down and soap is dispensed. Afterwards the servo moves back to its starting position, the pump moves up again.
To ensure the function you have to adjust three values in the code. To do this, build up the circuit and do a dry test without soap dispenser. Load the code on the Arduino board and start the serial monitor of the Arduino software (Tools>Serial Monitor). Set the baud rate (at the bottom of the window) to 115200. Now you should see the values from the sensor. Hold your hand over the sensor and remember the value at which the sensor should trigger. Write the value into the variable irThreshold.
Now try out values for the servo: Where should it start and how far should it turn. You do this with the variables servoPositionPumps and servoPositionNonPumps. If everything fits, install the soap dispenser. Of course there is a little bit of handicraft work involved.
Code
#include <Servo.h>
int servoPin = 7;
int irPin = 0;
Servo myServo; // create servo object
int servoPositionPumpen = 30; // adjust to your servo
int servoPositionNichtPumpen = 120; // adjust to your servo
int irThreshold = 300; // when shall the sensor react?
int lastState = -1; // -1 = pump not pushed
int state = -1;
void setup() {
Serial.begin(115200); // start serial monitor
myServo.attach(servoPin); // initialise servo motor
myServo.write(servoPositionNichtPumpen); // servo to start position
delay(1000); // wait for one second
}
void loop() {
Serial.println(analogRead(irPin)); // serial output of sensor value
if (analogRead(irPin)>irThreshold) state = 1; // trigger event detected
else state = -1; // no trigger event detected
if ((state==1)&&(lastState!=1)){ // prevent continious triggering
myServo.write(servoPositionPumpen); // pump
delay(1000); // wait for one second
myServo.write(servoPositionNichtPumpen); // release pump
delay(1000); // wait for one second
}
lastState=state;
delay(20);
}
Can you put a video their to show the tutorial please cause all i need is that to understand
and thank you in advance
can you plz tell whih sensor are you using
You can use this one from Sharp: https://amzn.to/2X40Qk2 It is suited form 2 to 15 cm.