Ich zeige dir heute, wie du mit einer H-Brücke aus MOSFETs einen Elektromotor in beide Richtungen steuern kannst. Eine H-Brücke ermöglicht es dir, die Polarität der Spannung am Motor umzukehren und somit die Drehrichtung zu ändern – perfekt für Roboterprojekte, ferngesteuerte Fahrzeuge oder andere Anwendungen, bei denen du präzise Motorkontrolle brauchst.
In diesem Tutorial verwende ich Logic-Level-MOSFETs, die direkt mit den 5V-Ausgangspins eines Arduino angesteuert werden können. Das ist ein wichtiger Unterschied zu vielen anderen Anleitungen, die MOSFETs verwenden, welche bei 5V Gate-Spannung nicht vollständig durchschalten.
Materialliste
- N-Channel Logic-Level-MOSFET IRLZ44N (2×)
- P-Channel Logic-Level-MOSFET IRF9Z34N (2×)
- NPN-Transistor BC547 (2×) – für die P-Channel-Ansteuerung
- Widerstände 100 Ω (4×) – Gate-Vorwiderstände
- Widerstände 10 kΩ (2×) – Pull-up für P-Channel-Gates
- Widerstände 1 kΩ (2×) – Basis-Vorwiderstände BC547
- Freilaufdioden 1N4007 (4×) – Schutz vor induktiven Spannungsspitzen
- Kondensator 100 µF – Entkopplung der Versorgungsspannung
- DC-Elektromotor 6–12 V
- Breadboard und Verbindungskabel
- Spannungsquelle 6–12 V (separat vom Arduino!)
- Arduino oder anderer Mikrocontroller
⚠️ Wichtig – MOSFET-Auswahl: Nicht alle MOSFETs sind für die direkte Ansteuerung durch einen Arduino geeignet. Der klassische IRFZ40 und der IRF9Z30 schalten bei 5V Gate-Spannung nicht vollständig durch – das führt zu hohen Verlusten und überhitzten Bauteilen. Der IRLZ44N (N-Channel) und IRF9Z34N (P-Channel) sind Logic-Level-Typen, die bei 5V sauber durchschalten.
Technische Grundlagen
Was ist eine H-Brücke?
Eine H-Brücke besteht aus vier Schaltern (hier: MOSFETs), die in einer H-förmigen Konfiguration angeordnet sind. Durch gezieltes Schalten dieser Transistoren kannst du die Stromrichtung durch den Motor umkehren und damit seine Drehrichtung ändern.
Die vier möglichen Zustände sind:
- Vorwärts: Oberer linker + unterer rechter MOSFET leiten → Strom fließt von links nach rechts durch den Motor
- Rückwärts: Oberer rechter + unterer linker MOSFET leiten → Strom fließt von rechts nach links
- Bremsen: Beide unteren (oder beide oberen) MOSFETs leiten → Motor wird aktiv kurzgeschlossen und gebremst
- Freilauf: Alle MOSFETs gesperrt → Motor läuft frei aus
⚠️ Shoot-Through – unbedingt vermeiden: Du darfst niemals gleichzeitig den oberen und unteren MOSFET derselben Seite durchschalten. Das erzeugt einen direkten Kurzschluss zwischen Versorgungsspannung und GND und zerstört sofort die Bauteile. Im Code sorgen Dead-Time-Verzögerungen dafür, dass zwischen dem Ausschalten eines MOSFETs und dem Einschalten seines Gegenstücks immer eine kurze Pause liegt.
N-Channel vs. P-Channel MOSFETs
- N-Channel MOSFET (IRLZ44N): Schaltet durch, wenn am Gate eine positive Spannung (relativ zu Source) anliegt. Wird auf der Low-Side (Masse-Seite) eingesetzt. Kann direkt vom Arduino angesteuert werden, da Source auf GND liegt.
- P-Channel MOSFET (IRF9Z34N): Schaltet durch, wenn das Gate negativer als die Source ist. Wird auf der High-Side (Versorgungsspannungs-Seite) eingesetzt. Hier liegt Source auf der Motorspannung (z.B. 12V) – der Arduino-Ausgang (5V) kann das Gate daher nicht direkt auf ausreichend niedriges Potential ziehen. Deswegen brauchen wir eine Treiberstufe mit einem BC547.
Warum ein Transistor für die P-Channel-Ansteuerung?
Angenommen, deine Motorspannung beträgt 12V. Die Source des P-Channel-MOSFETs liegt auf 12V. Damit der MOSFET leitet, muss das Gate auf ca. 12V − 5V = 7V oder weniger gezogen werden. Ein Arduino-Ausgang (0V oder 5V) kann das Gate nicht direkt auf dieses Potential bringen.
Die Lösung: Ein NPN-Transistor (BC547) als Treiberstufe. Wenn der Arduino den BC547 einschaltet (Basis auf HIGH), zieht dessen Kollektor das Gate des P-MOSFETs auf GND – der P-MOSFET schaltet durch. Ein Pull-up-Widerstand (10 kΩ) von Gate nach Versorgungsspannung sorgt dafür, dass der P-MOSFET sicher sperrt, wenn der BC547 ausgeschaltet ist.
Das Ergebnis ist eine invertierte Logik für die oberen MOSFETs: Arduino HIGH → P-MOSFET leitet.
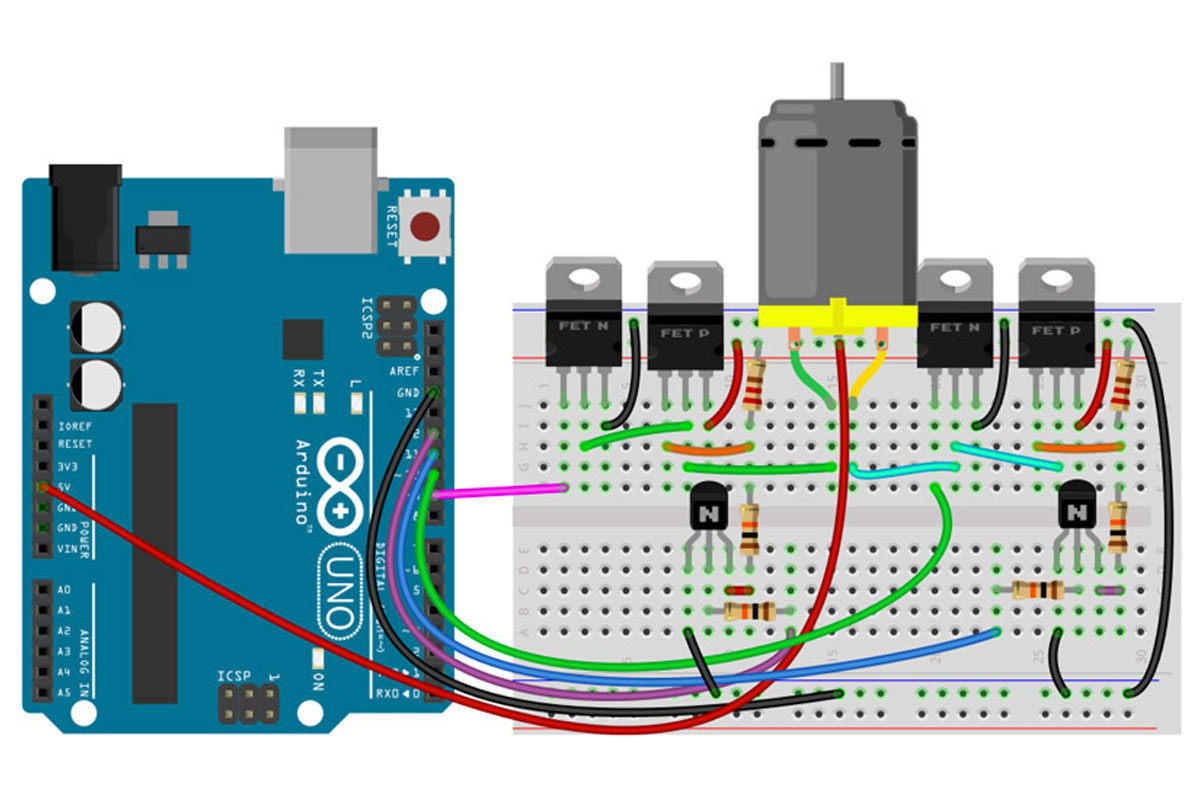
Schaltplan und Aufbau
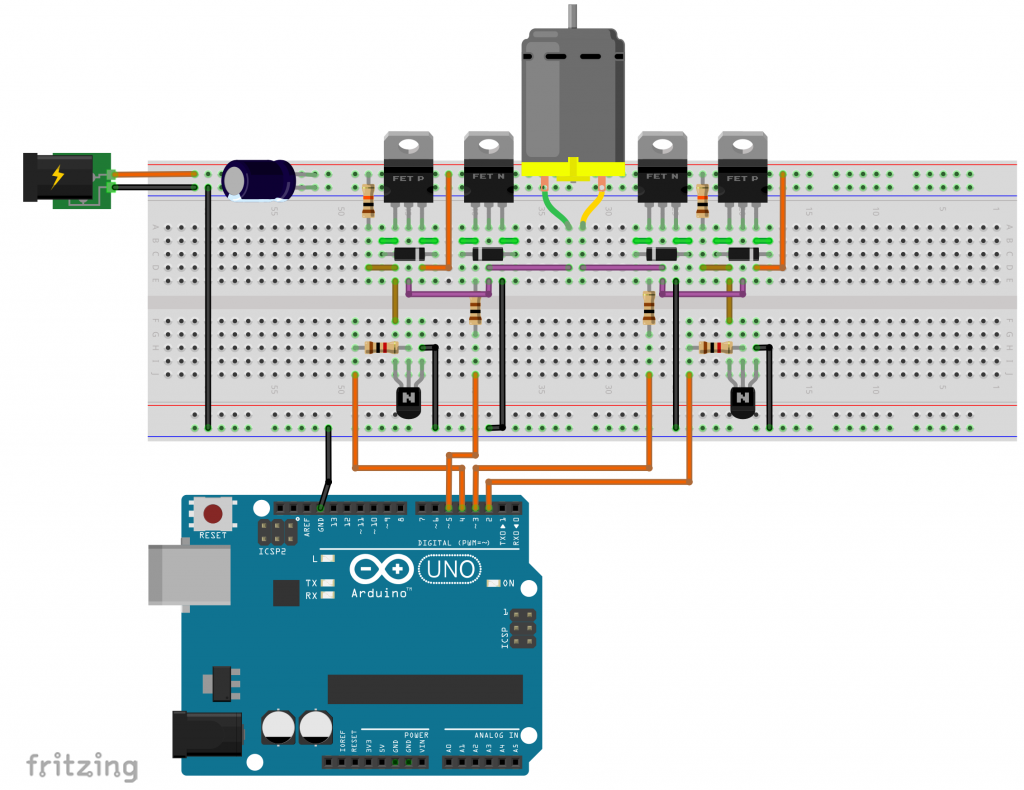
Schritt-für-Schritt-Aufbau
1. Stromversorgung vorbereiten:
- Verwende eine separate Spannungsquelle für den Motor (6–12V). Speise den Motor niemals direkt aus dem Arduino – der kann maximal ~500mA liefern.
- Schalte einen 100-µF-Kondensator parallel zur Motorspannung (nahe der Schaltung), um Spannungsspitzen abzufangen.
- Verbinde GND der Motorspannungsquelle mit GND des Arduino.
2. Low-Side – N-Channel-MOSFETs (IRLZ44N):
- Source beider IRLZ44N auf GND
- Je ein 100-Ω-Widerstand zwischen Arduino-Ausgang und Gate (dämpft Schwingungen)
- Drain bildet jeweils den Motoranschluss (zusammen mit dem darüberliegenden P-MOSFET)
3. High-Side – P-Channel-MOSFETs (IRF9Z34N) mit BC547-Treiber:
- Source beider IRF9Z34N auf Motorspannung (+V_Motor)
- 10-kΩ-Pull-up-Widerstand von Gate nach +V_Motor (hält Gate oben = MOSFET gesperrt)
- Kollektor des BC547 an das Gate des IRF9Z34N
- Emitter des BC547 auf GND
- 1-kΩ-Widerstand von Arduino-Ausgang an Basis des BC547
- Drain bildet den Motoranschluss (zusammen mit dem IRLZ44N darunter)
4. Motor anschließen:
- Die beiden Motoranschlüsse kommen jeweils zwischen den Drain des oberen (P-Channel) und unteren (N-Channel) MOSFETs einer Seite
5. Freilaufdioden (1N4007):
- Je eine Diode antiparallel zu jedem MOSFET (Anode an Drain, Kathode an Source beim N-Channel; umgekehrt beim P-Channel)
- Sie fangen die induktiven Spannungsspitzen ab, die der Motor beim Abschalten erzeugt – ohne sie können die MOSFETs zerstört werden
Ansteuerungslogik
Durch die invertierende BC547-Stufe gilt für alle vier Steuerpins einheitlich: HIGH = MOSFET leitet.
| Richtung | Pin 1 (links oben) | Pin 2 (links unten) | Pin 3 (rechts oben) | Pin 4 (rechts unten) |
|---|---|---|---|---|
| Vorwärts | HIGH | LOW | LOW | HIGH |
| Rückwärts | LOW | HIGH | HIGH | LOW |
| Stop (Freilauf) | LOW | LOW | LOW | LOW |
| Bremsen | LOW | HIGH | LOW | HIGH |
Der Code
// H-Brücke mit Logic-Level-MOSFETs und BC547-Treiber für P-Channel
// Alle Pins: HIGH = MOSFET leitet (durch BC547 invertierte P-Channel-Ansteuerung)
const int PIN_LEFT_HIGH = 2; // Linker oberer MOSFET (P-Channel via BC547)
const int PIN_LEFT_LOW = 3; // Linker unterer MOSFET (N-Channel, direkt)
const int PIN_RIGHT_HIGH = 4; // Rechter oberer MOSFET (P-Channel via BC547)
const int PIN_RIGHT_LOW = 5; // Rechter unterer MOSFET (N-Channel, direkt)
// Dead-Time in Mikrosekunden – Pause zwischen Umschalten
// Verhindert Shoot-Through (Kurzschluss durch gleichzeitig leitende MOSFETs)
const int DEAD_TIME_US = 10;
void setup() {
pinMode(PIN_LEFT_HIGH, OUTPUT);
pinMode(PIN_LEFT_LOW, OUTPUT);
pinMode(PIN_RIGHT_HIGH, OUTPUT);
pinMode(PIN_RIGHT_LOW, OUTPUT);
motorStop();
Serial.begin(9600);
Serial.println("H-Brücke bereit.");
}
void loop() {
Serial.println("Vorwärts");
motorForward();
delay(2000);
motorStop();
delay(500);
Serial.println("Rückwärts");
motorBackward();
delay(2000);
motorStop();
delay(500);
}
// Alle MOSFETs ausschalten (Freilauf)
void motorStop() {
digitalWrite(PIN_LEFT_HIGH, LOW);
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_LEFT_LOW, LOW);
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_RIGHT_HIGH, LOW);
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_RIGHT_LOW, LOW);
}
// Motor vorwärts: links oben + rechts unten leiten
void motorForward() {
motorStop(); // Erst alles aus (Dead-Time sicherheitshalber)
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_LEFT_HIGH, HIGH);
digitalWrite(PIN_RIGHT_LOW, HIGH);
}
// Motor rückwärts: rechts oben + links unten leiten
void motorBackward() {
motorStop();
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_RIGHT_HIGH, HIGH);
digitalWrite(PIN_LEFT_LOW, HIGH);
}
// Motor aktiv bremsen: beide unteren MOSFETs leiten (Motor kurzgeschlossen)
void motorBrake() {
motorStop();
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_LEFT_LOW, HIGH);
digitalWrite(PIN_RIGHT_LOW, HIGH);
}
// Geschwindigkeitssteuerung via PWM (nur auf N-Channel-Pins, Pin 3 und 5 sind PWM-fähig)
// speed: 0–255
void motorForwardPWM(int speed) {
motorStop();
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_LEFT_HIGH, HIGH); // P-Channel links: dauerhaft ein
analogWrite(PIN_RIGHT_LOW, speed); // N-Channel rechts: PWM
}
void motorBackwardPWM(int speed) {
motorStop();
delayMicroseconds(DEAD_TIME_US);
digitalWrite(PIN_RIGHT_HIGH, HIGH);
analogWrite(PIN_LEFT_LOW, speed);
}
Hinweis zu PWM: PWM wird hier nur auf den N-Channel-MOSFETs (Low-Side) eingesetzt. Das ist die einfachere und zuverlässigere Variante. Für sehr hochfrequentes PWM (>10 kHz) empfiehlt sich ein dedizierter Gate-Treiber-IC – für typische Maker-Projekte reicht diese Schaltung aber problemlos aus.
Troubleshooting
Motor dreht sich gar nicht
- Ist GND der Motorspannungsquelle mit Arduino-GND verbunden?
- Miss die Gate-Spannungen mit einem Multimeter: Beim IRLZ44N sollten am Gate 5V anliegen (wenn leitend). Beim IRF9Z34N sollte das Gate nahe GND liegen (wenn leitend).
- Prüfe, ob der BC547 schaltet: Kollektor-Emitter-Spannung sollte bei aktivem Transistor unter 0,3V liegen.
MOSFETs werden sehr heiß
- Wahrscheinlicher Shoot-Through: Überprüfe, ob nie gleichzeitig oberer und unterer MOSFET einer Seite leiten.
- Erhöhe die Dead-Time im Code (DEAD_TIME_US).
- Bei höheren Strömen (>3A) Kühlkörper auf die MOSFETs montieren.
Motor läuft nur in eine Richtung
- Prüfe die BC547-Schaltung für die nicht funktionierende Seite.
- Miss die Basis-Spannung des BC547 – sie sollte bei HIGH-Signal ca. 4,3V betragen (5V minus Spannungsabfall am 1-kΩ-Widerstand).
Motor vibriert oder brummt, dreht sich aber kaum
- Zu wenig Strom: Prüfe, ob deine Spannungsquelle ausreichend Strom liefert.
- PWM-Frequenz zu niedrig: Der Standard-analogWrite() des Arduino läuft auf ~490 Hz. Für manche Motoren besser höhere Frequenzen einstellen.
Erweiterungsmöglichkeiten
- Strommessung: Shunt-Widerstand (z.B. 0,1 Ω) in der GND-Leitung des Motors + analogRead() zum Überwachen des Motorstroms
- Optokoppler: Für galvanische Trennung zwischen Steuerung und Leistungsteil – besonders bei höheren Spannungen sinnvoll
- Gate-Treiber-IC: Z.B. IR2104 für sauberes High-Side-Switching und eingebaute Dead-Time – empfohlen ab ca. 5A oder PWM-Frequenzen über 20 kHz
- Mehrere Motoren: Mehrere H-Brücken für Roboter mit Rädern – jede Brücke benötigt 4 Arduino-Pins
- Encoder-Feedback: Hallsensor oder optischer Encoder am Motor für Positions- oder Drehzahlregelung
Fazit
Mit dieser H-Brücke aus Logic-Level-MOSFETs (IRLZ44N + IRF9Z34N) und BC547-Treiberstufen für die High-Side hast du eine Schaltung, die zuverlässig mit einem 5V-Arduino zusammenarbeitet und Motorspannungen von 6–20V schalten kann.
Die wichtigsten Punkte zum Mitnehmen:
- Nur Logic-Level-MOSFETs verwenden – Standard-MOSFETs schalten bei 5V nicht vollständig durch
- P-Channel High-Side immer mit Treibertransistor ansteuern
- Freilaufdioden sind kein optionales Extra – ohne sie werden die MOSFETs zerstört
- Dead-Time im Code schützt vor Shoot-Through
- Motor immer separat versorgen, nicht vom Arduino
Fang mit niedrigen Spannungen und kleinen Motoren an. Wenn die Schaltung läuft, kannst du die Spannung schrittweise erhöhen und mit PWM-Geschwindigkeitssteuerung experimentieren.
Wenn dir das Projekt gefallen hat und du von weiteren interessanten Projekten inspiriert werden willst, sieh dir doch mal mein neues E-Book »Arduino Projekte Volume 1« an!
- Die beliebtesten Arduino-Projekte von StartHardware
- Inklusive Schaltplan, Beschreibung und Code
- Arduino-Schnellstart-Kapitel
- Kompakter Programmierkurs
Hallo,
in der aktuellen Version des Schaltbildes ist leider keine Batterie mehr enthalten obwohl in den KOmmentaren hin und wieder darauf Bezug genommen wird.
Gab es einen Grund, auf eine separate Stromversorgung für den Motor zu verzichten?
Könnte mir jemand das Schaltbild mit Batterie zusenden?
Hallo!
Meine Frage ist eig recht simpel.
Wenn ich den Motor nach rechts/links drehen will und die Drehzahl mit einer PWM steuere wie muss ich das dann Anschließen
Hallo,
zum Thema P-Mosfet:
Die Widerstände 10kOhm und 220 Ohm müssen vertauscht werden, da das Gate des P-Mosfet sonst bei geschaltetem npn Transistor ungefähr 10k/(10k+220) * Uv bekommt. Wobei Uv die Versorgungsspannung ist.
Bei gesperrtem npn Transistor liegt am Gate ungefähr die Versorgungsspannung Uv an.
Der Mosfet schaltet dadurch nicht.
Abhilfe schafft das Vertauschen der beiden Widerstände.
Wer noch etwas schnellere Schaltzeiten benötigt, kann beide Werte einfach noch halbieren, dritteln, oder sogar vierteln. (!!Spezifikationen des npn Transistors und Versorgungsspannung beachten!!)
Gruß, Stefan
Hallo Stefan,
besteht die möglichkeit mit einer anderen Software den Arduino beim laufenden Programm die Geschwindigkeit mit einem Schieber zu varieren, vorwärts rückwärts langsam schnell ohne bestimmte abläufe vorher zu Programmieren
Hallo,
der IRF9z30 verträgt eine Gate-Source-Spannung von -5V. Das bedeutet, man sollte die 10k mit der gezeigten Konfiguration weg lassen. Allerdings ist der Rds bei -5V noch realtiv hoch, wodurch die Verlustleistung ebenfalls relativ hoch ist. Grob überschlagen würde ich bei Raumtemperatur, ohne Kühlkörper den 9z30 maximal mit 800mA belasten.
Hallo,,
ich habe Interesse diese Schaltung zu verstehen und nachzubauen. Beim Verstehen gibt es aber das erste Prolem. Das Gate vom P-Mosfet wird über 220Ohm gegen Betriebsspannung gelegt und über 10KOhm durch den Transistor BC547 gegen Masse gezogen. Nach Ohmschen Gesetz verändert das die Spannung am Gate doch nur unwesentlich. Wie kann die Schaltung da funktionieren??? Und wie muß das Programm aussehen wenn ich z.B. über 2 Tasten den Motor in beiden Drehrichtungen mit unterschiedlichen Geschwindigkeiten und Richtungen steuern will?
Für Antworten vielen Dank und frohe Ostern
Peter
Eine Selbstbau-H-Brücke ist immer ein schwieriges Unterfangen.
Ein P-Mosfet sperrt, wenn am Gate ca die gleiche Spannung anliegt, wie am Source. Im Fall dieses Schaltbildes mit Versorgungsspanung für Motore größer als 5V schalten die oberen P_MOSFETS nie aus. Es kommt zu einem Kurzschluß. Wegen der Maximalen GARE-Sourcerspannung von +/- 20 V darf die Schaltung falls sie funktionieren würde auch nicht mit 24V betrieben werden.
Abhilfe: Ansteuerung des P_Mosfets durch einen Transistor wobei ich eine Ansteuerung durch 4 Arduino Ausgänge bevozuge, weil so der Motor ungebremst auslaufen kann (alle 4 MOSFET gesperrt). Ansonsten AnsteuerungsICs wie zB IR2104 und alles N-MOSFETs verwenden oder besser eine fertiges IC oder Modul nehmen.
Die genannten Mosfets sind für die Ansteuerung direkt durch Arduino nicht geeignet, da sie bei 5V Gatespannung nicht ganz durchschalten. Es sind Logic Level MOSFETs zu verwenden.
Stefan bitte ergänze und korrigiere die Beschreibung der Schaltung dahingehend, daß für diese Schaltung die Versorgungsspannung des Motors nicht größer als 5V sein darf.
Danke Uwe
@Uwefed: Vielen Dank für die Nachricht. Man lernt doch nie aus. Den Artikel ändere ich schnellstmöglich. Liebe Grüße, Stefan“
As more and more homeowners are forced to leave their homes, they turn to renting for the short term.
Playing games is not only for youngsters, it’s also for the youthful generation.
On top of this shock, I find out we now have a baby coming soon.
Hallo,
ich habe den Code so gemacht:
dadurch dreht sich mein Robotor einmal 3 sekunden nach links und dann 3 sekunden nach rechts…
Den linken Motor habe ich an pin 8 und 9
den rechten an pin 11 und 12 (einfach anschliessen ich weiss nicht mehr genau wie ich die Motoren angesteckt habe, also welcher Pin für forwärts und rückwärts war…)
int motor1l = 8;
int motor1r = 9;
int motor2l = 11;
int motor2r = 12;
void setup()
{
pinMode(motor1l, OUTPUT);
pinMode(motor1r, OUTPUT);
pinMode(motor2l, OUTPUT);
pinMode(motor2r, OUTPUT);
}
void loop()
{
analogWrite(motor1r, 100);
digitalWrite(motor1l, LOW);
analogWrite(motor2l, 100);
digitalWrite(motor2r, LOW);
delay(3000);
analogWrite(motor1l, 100);
digitalWrite(motor1r, LOW);
analogWrite(motor2r, 100);
digitalWrite(motor2l, LOW);
delay(3000);
}
You can certainly see your enthusiasm within the work you write.
The arena hopes for more passionate writers like you who aren’t afraid to say
how they believe. At all times follow your heart.